News
3D printing bone tissue
Jun 28 2022
Read More
Researchers from ACES and the University of Wollongong (UOW) have come together to further explore soft robotics in a paper published in IEEE/ASME Transactions on Mechatronics, delving into the advances in 3D printed soft robotic fingers.

Dr Charbel Tawk
The new findings lean on previous research out of ACES from the Soft Robotics Program and the team’s development of new robotic systems. Led by ACES Chief Investigator Prof Gursel Alici, the team has been working to progress revolutionary new robotics that capitalise on the mechanical actuation and sensing properties of electromaterials.
ACES PhD graduate and Associate Research Fellow in Mechanical Engineering, Dr Charbel Tawk, worked with Prof Alici on the paper as well as ACES Research Fellow Dr Hoa Zhou and UOW Lecturer with the School of Mechanical, Materials, Mechatronic and Biomedical Engineering, Dr Emre Sariyildiz. ACES Chief Investigators Prof Geoffrey Spinks and Prof Marc in het Panhuis were also contributing authors and co-supervisors of Charbel during his PhD at ACES.
We caught up with Charbel to find out more about this recent work and its future implications.
Can you explain this new research in a bit more detail?
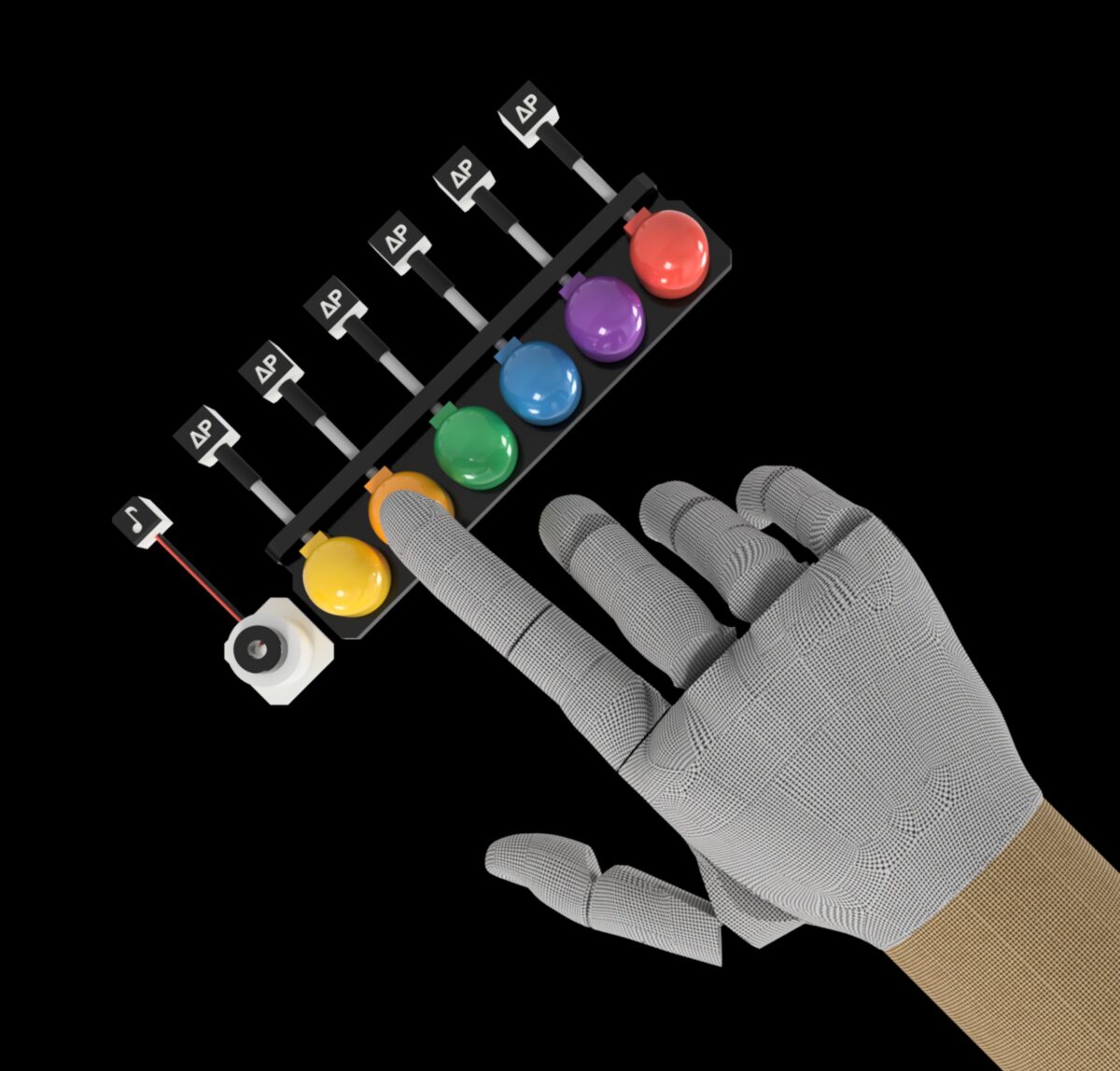
We have developed soft fingers with embedded position and touch sensors that can be directly 3D printed using affordable and accessible 3D printers and materials. These 3D printers are known as fused deposition modelling printers that are widely used by engineers, scientistic and hobbyists.
The sensing elements embedded in the monolithic structure of the fingers are based on pneumatic deformable sensing chambers that can sense both applied mechanical pressures or forces on the tip of a finger and the position of the finger in space.
The sensing elements were designed and optimised based on finite element modelling simulations to assess them rapidly before their fabrication. Finally, we have developed a mathematical model based on the sensing elements to use their signals to accurately control the position of the fingers and their tip forces in real-time.
Such robotic fingers can be used in various technologies including soft grippers for delicate objects manipulation, robotic hands for industry 4.0, and prosthetic hands.
How did it come together?
The work combines two research topics that we are currently working on at UOW and ACES under the supervision of Senior Prof Gursel Alici. The first is about developing soft and smart 3D printable prosthetic fingers and hands for upper limb amputees. The second is about developing 3D printable sensing chambers and elements for human-machine interfaces and wearable technologies that can be used to control soft robotic systems in real-time.
What are the future implications for this research?
In our recent review paper, we mentioned that the continuing advancements in additive manufacturing technologies and soft smart materials will allow us to 3D print soft robots entirely that can walk out of the printers with all the required elements such as actuators, sensors, electronics, and power sources. Also, the development of soft intelligent robots will expand vastly as the tools needed to build them are advancing very rapidly and becoming more affordable, accessible, and readily available for the community.
This research work contributes to the development of seamlessly embedding optimised sensing elements in 3D printable monolithic structures or fingers of a soft robotic system and controlling the robotic system using the feedback signals provided by the sensing elements to validate their performance and control the robotic system in real-time.
With that said, this research is one step forward towards developing 3D printable soft robotic devices with embedded actuation and sensing capabilities.
Great work, Charbal – and thanks for your time.
Access the paper here.










